
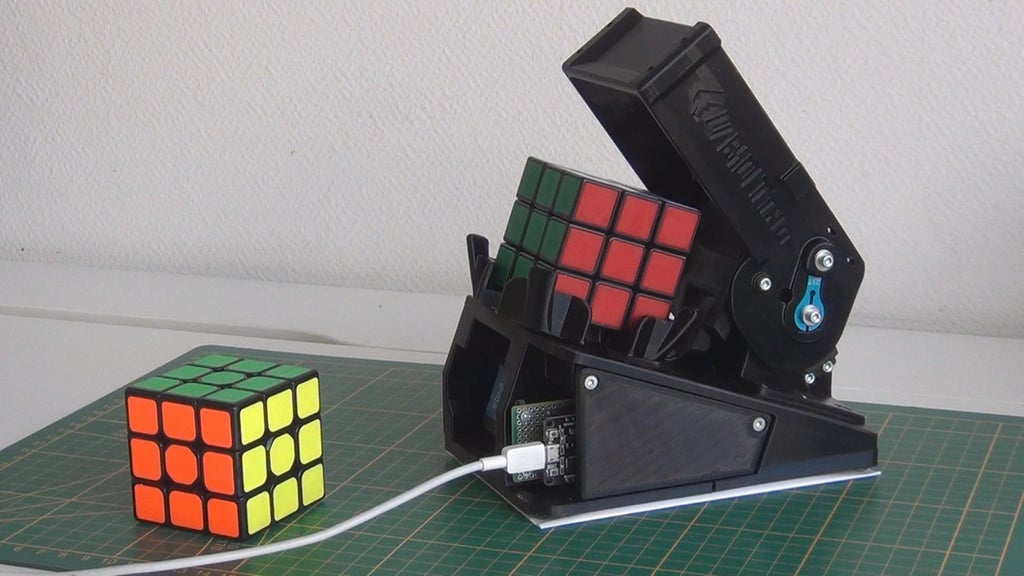
this is my second Rubik's cube solver robot project, and I set myself some clear targets: I wanted to make it very small, simple, 3D printed and especially inexpensive.
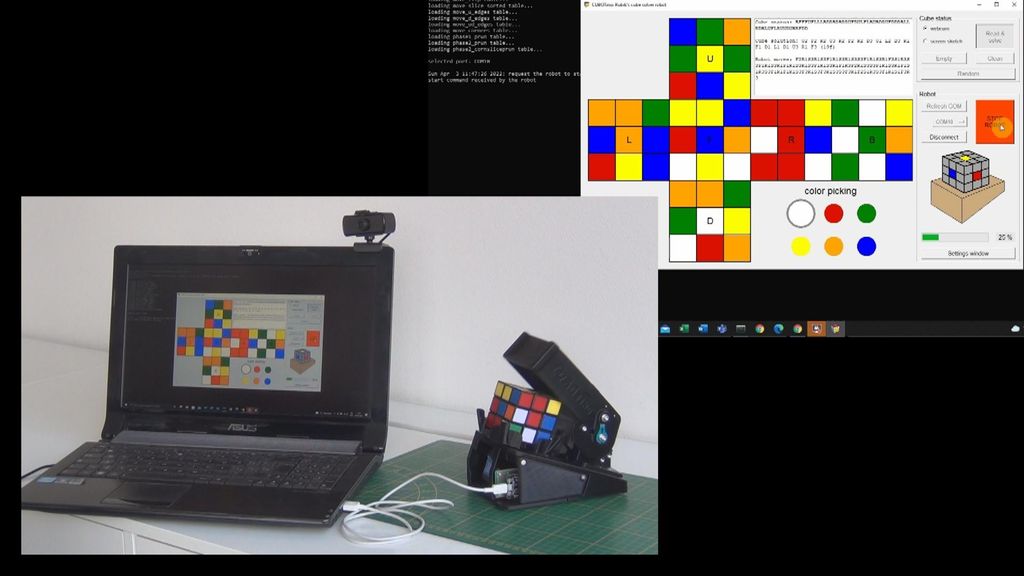
I used an ESP32 dev board, coded in Micropython, mainly to drive the servos and to communicate with a GUI located on a PC; Reason to chose this board has to do with budget and the idea to later add an ESP32-CAM board, to automate the cube status detection.
Thanks to forums (forums are amazing !), I've figured out how to use the UART communication via the same micro-usb port used to energize the robot; I've then removed the USB-UART converter, and obtained a much neat wiring.
Servos are driven directly by the ESP32 dev board (added a couple of capacitors to the 3v3 and 5v, to prevent voltage drops at servos start): A USB 2.0 from an old laptop is more than sufficient to keep everything running smooth.
I still figure myself as a principiant coder; My code is for sure highly inefficient, but the board is extremely fast compared to the (slow) robot, and the whole system works well
If you'd like to see the robot working: https://youtu.be/ZVbVmCKwYnQ
If you'd like to know more, or build one yourself (all files availabe: 3D files, code, instructions, etc): https://www.instructables.com/CUBOTino- ... nsive-Rub/
If you have questions, or tips, please let me know